
Deployable Automated Aerospace Systems
Research Demonstrations
Dynamical and Control Theory
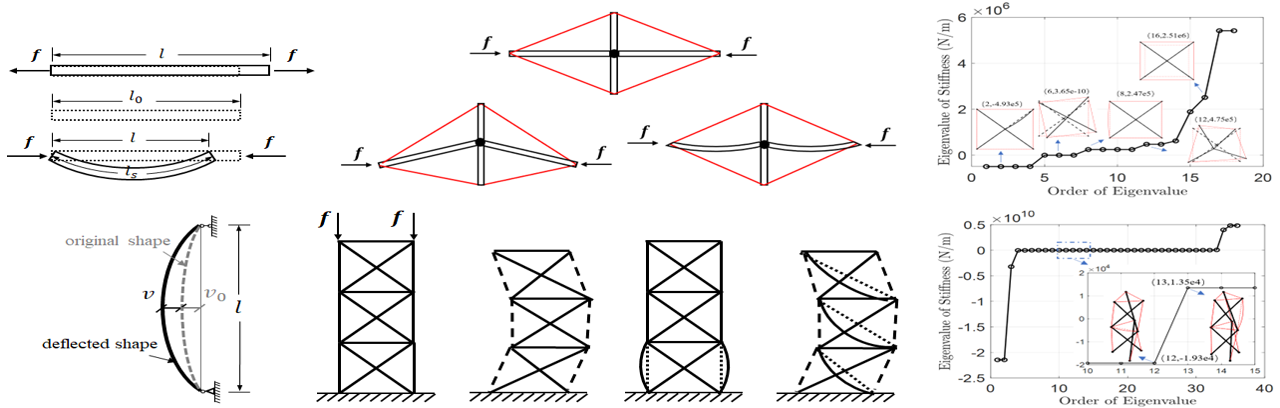
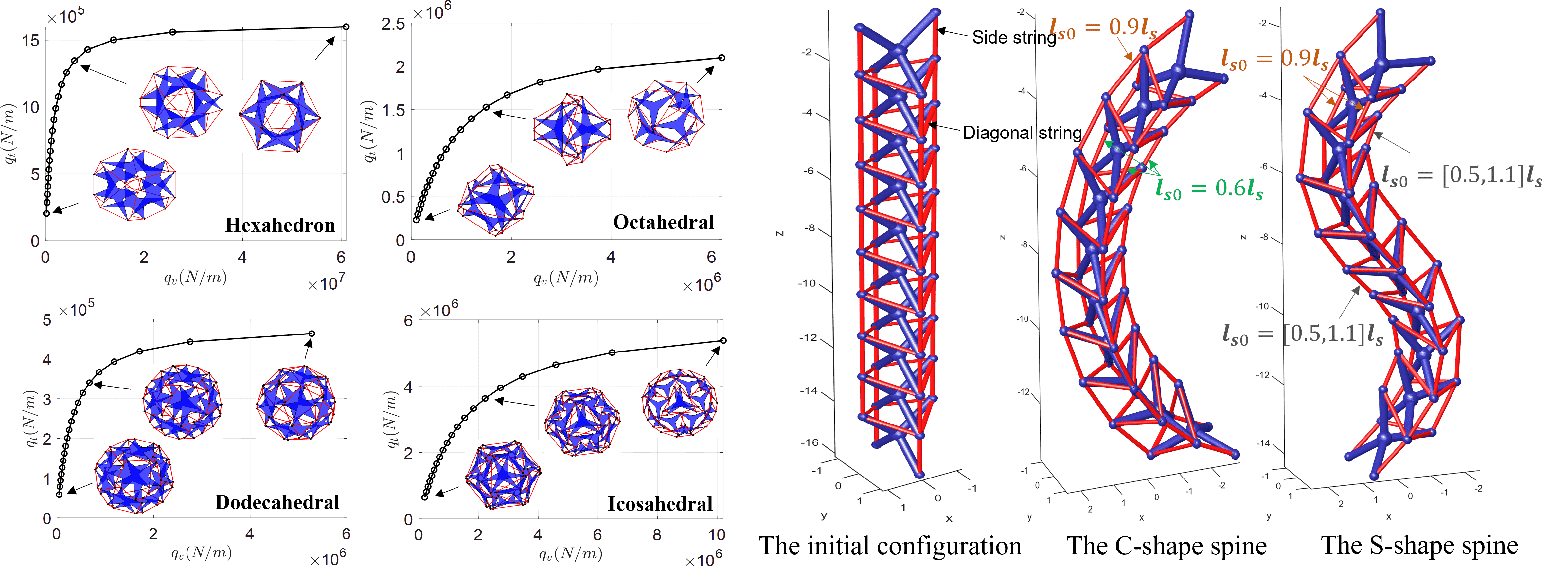
Stability Conditions of Tensegrity Structures subject to Local and Global Buckling
(Shuo Ma and Muhao Chen)
Dynamic Reference Tracking and Obstacle Avoidance Control Based on Reinforcement Learning
(Muhao Chen and Robert E. Skelton)
 |  |  |  |
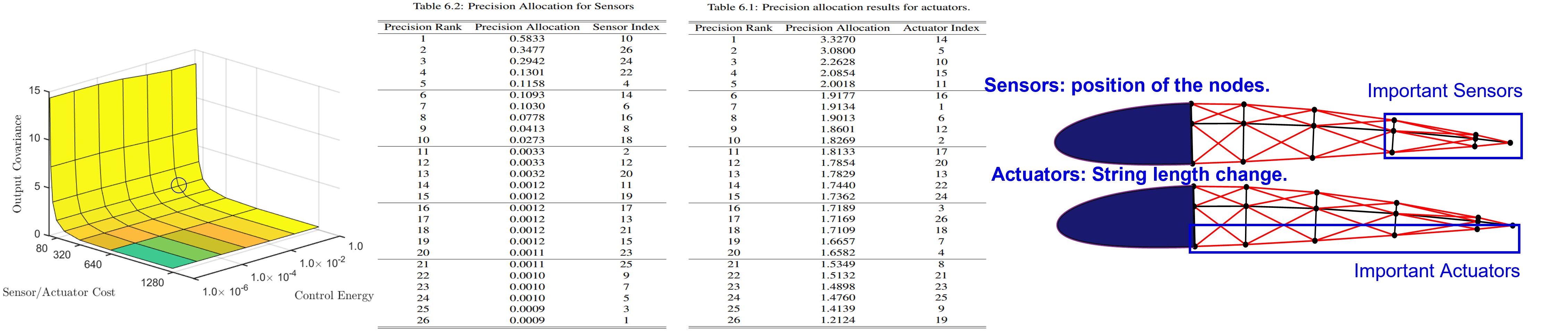
Economic Sensor & Actuator Selection for Tensegrity Robots Based on the Information Architecture
(Muhao Chen, Yuling Shen, Robert E. Skelton)
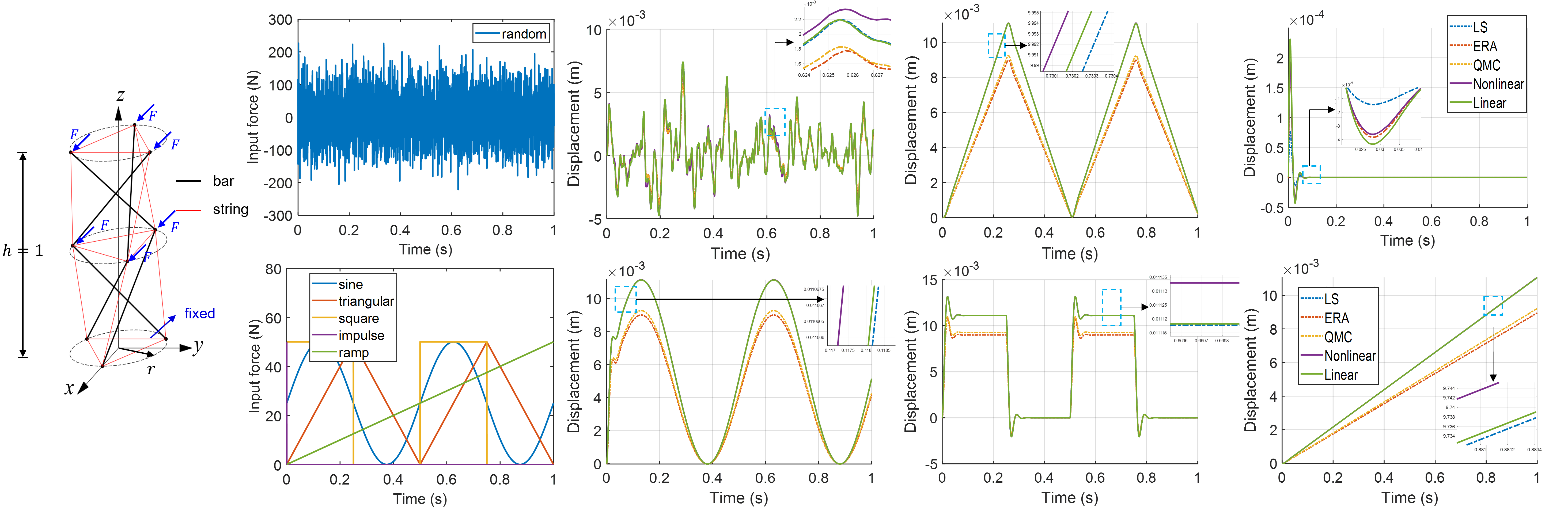
System Identification (QMC, LS, and ERA) to Tensegrity Systems
(Muhao Chen, Yuling Shen and Robert E. Skelton)
Model-Based and Data-Based Shape Control of Tensegrity Structures
(Muhao Chen and Robert E. Skelton)
 |  |  |  |
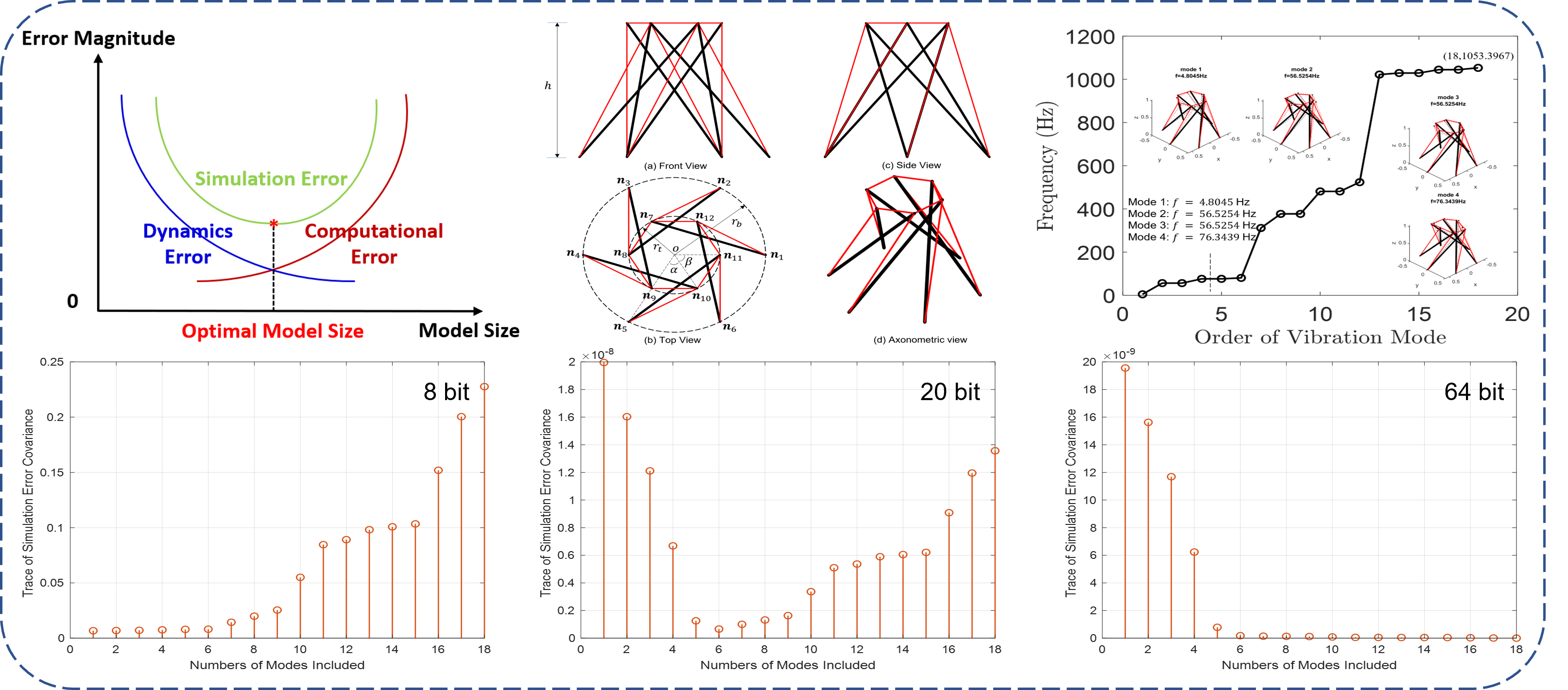
Finite-Word Length Optimal Simulation for High-Dimensional Dynamical Systems
(Yuling Shen, Muhao Chen, and Robert E. Skelton)
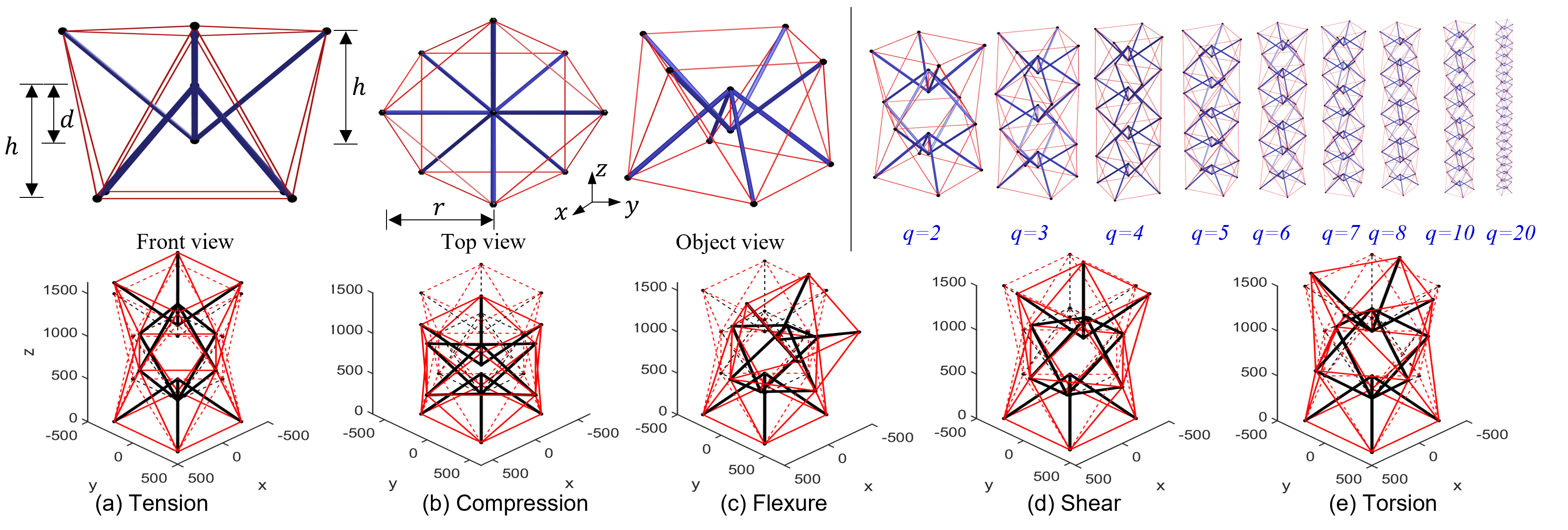
Energy-Efficient Cable-actuation Strategies of the V-Expander Tensegrity
(Muhao Chen, Aguinaldo Fraddosio, Andrea Micheletti, Gaetano Pavone, Mario Daniele Piccioni, and Robert E. Skelton)
Tensegrity System Dynamics in Fluids (FSI: Fluid-Structure Interaction)
(Muhao Chen, Jun Chen, Manoranjan Majji, and Robert E. Skelton)
 |  |  |  |  |
Rigid Body Tensegrity
(Shuo Ma, Muhao Chen, Zhangli Peng, Xingfei Yuan, and Robert E. Skelton)
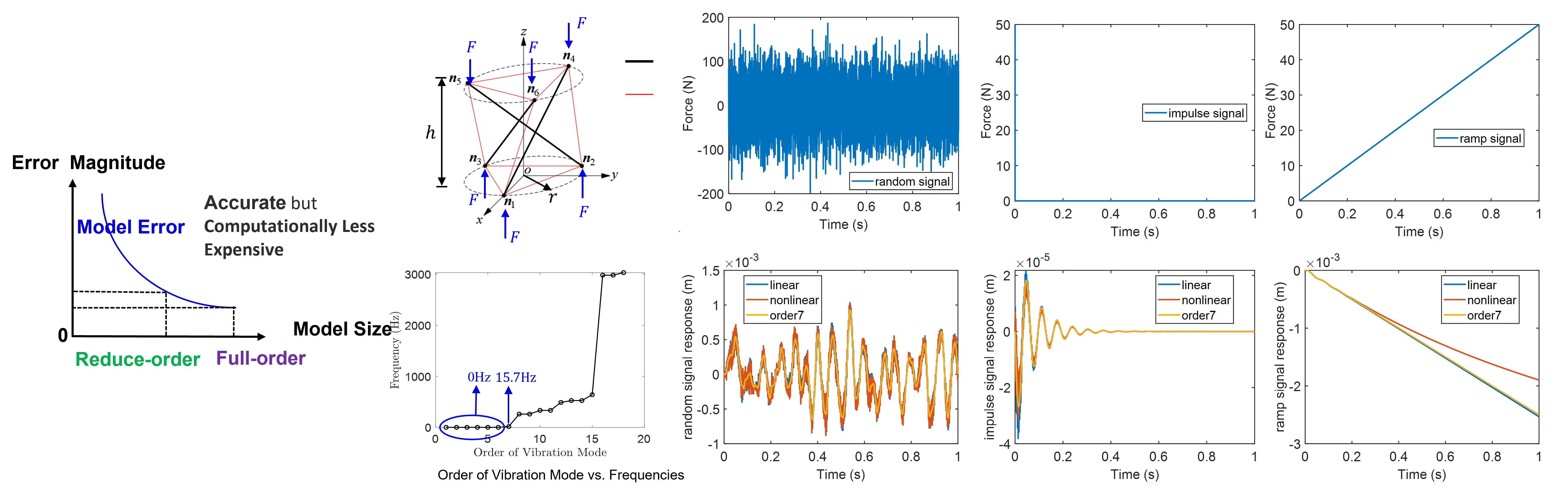
Model Reduction of Tensegrity Systems
(Muhao Chen and Robert E. Skelton)
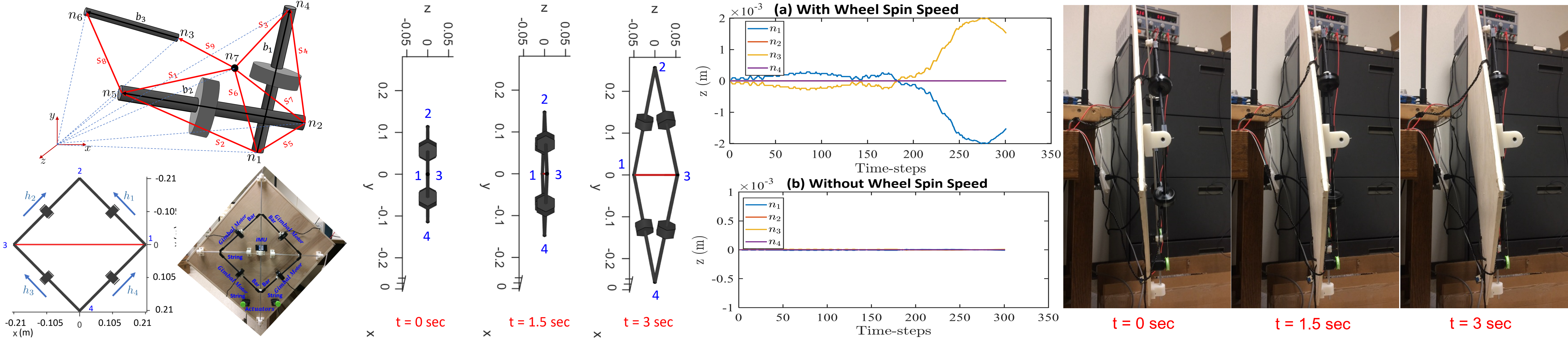
Gyroscopic Tensegrity Robots
(Raman Goyal, Muhao Chen, Manoranjan Majji, and Robert E. Skelton)
Deployable Lightweight Tensegrity Cable Net
(Shuo Ma, Muhao Chen, and Robert E. Skelton)
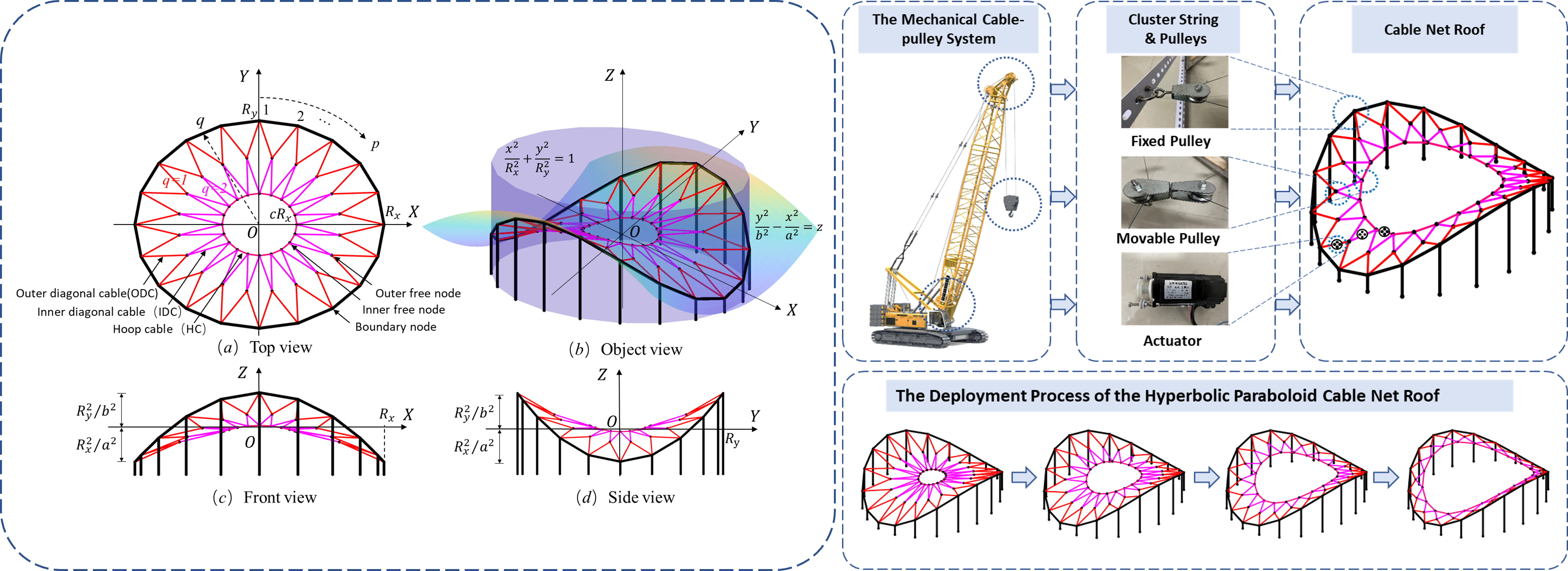
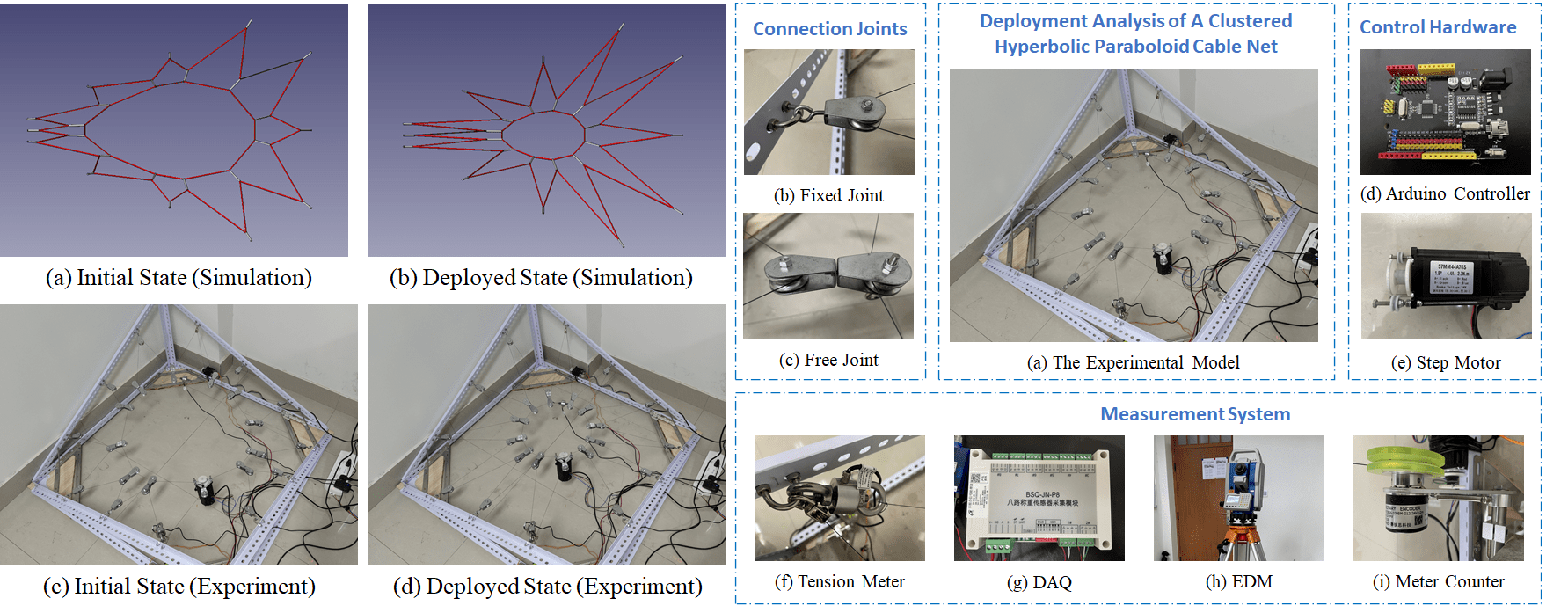
Deployable Clustered Cable Nets
(Shuo Ma, Kai Lu, Muhao Chen, and Robert E. Skelton)
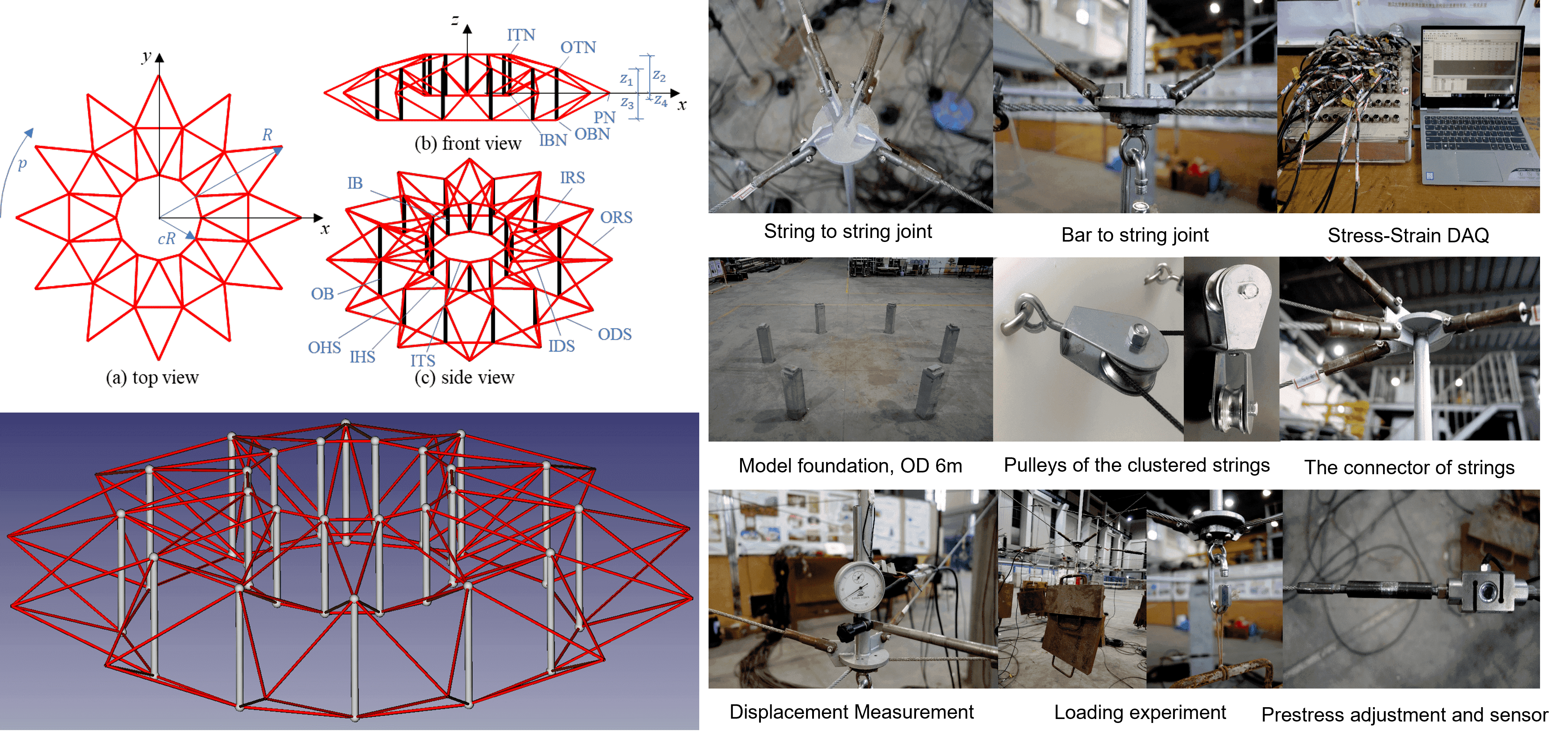
Deployable Cable Domes
(Shuo Ma, Muhao Chen, Xingfei Yuan, and Robert E. Skelton)
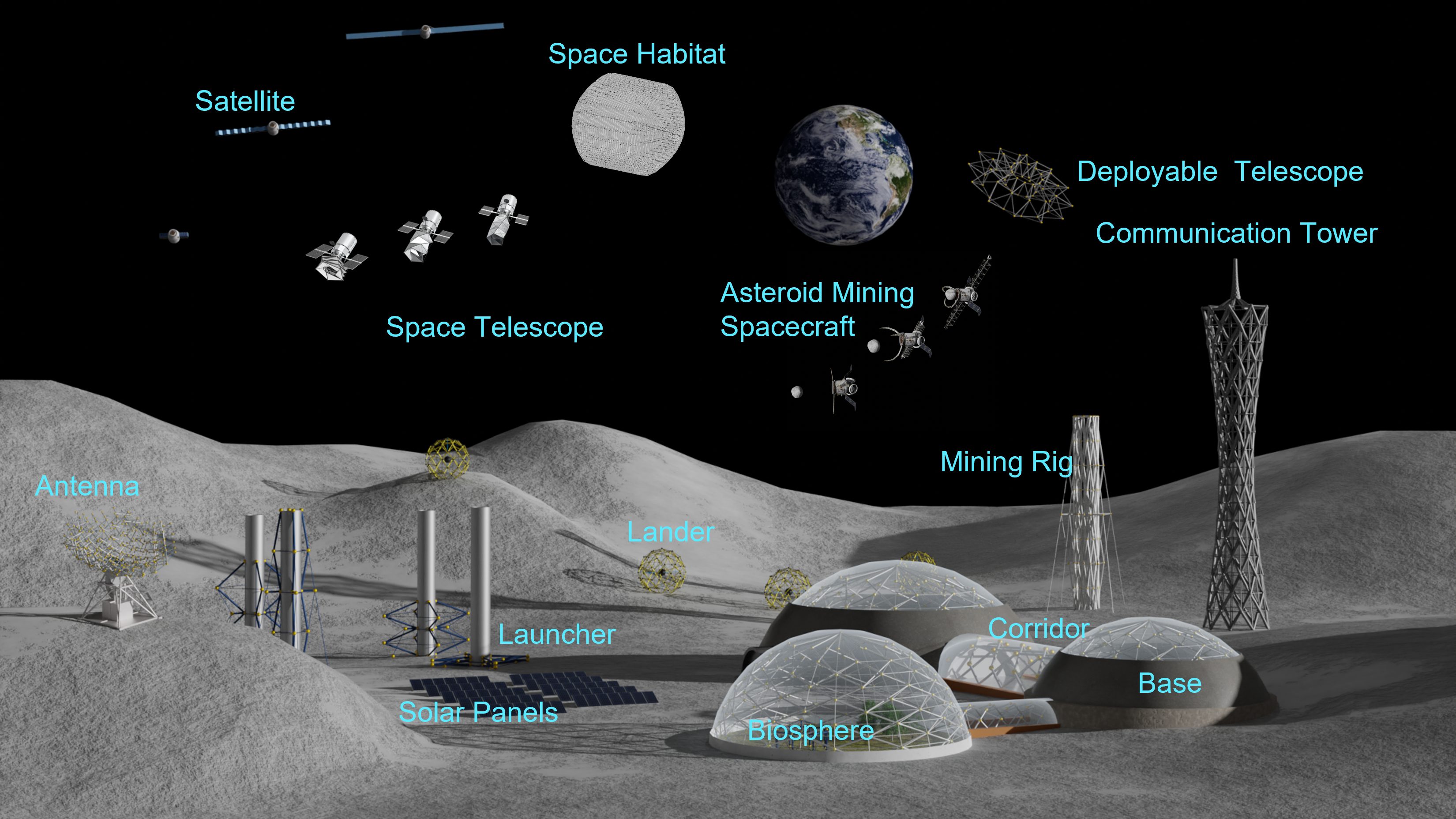
Lightweight Deployable Automated Space Systems
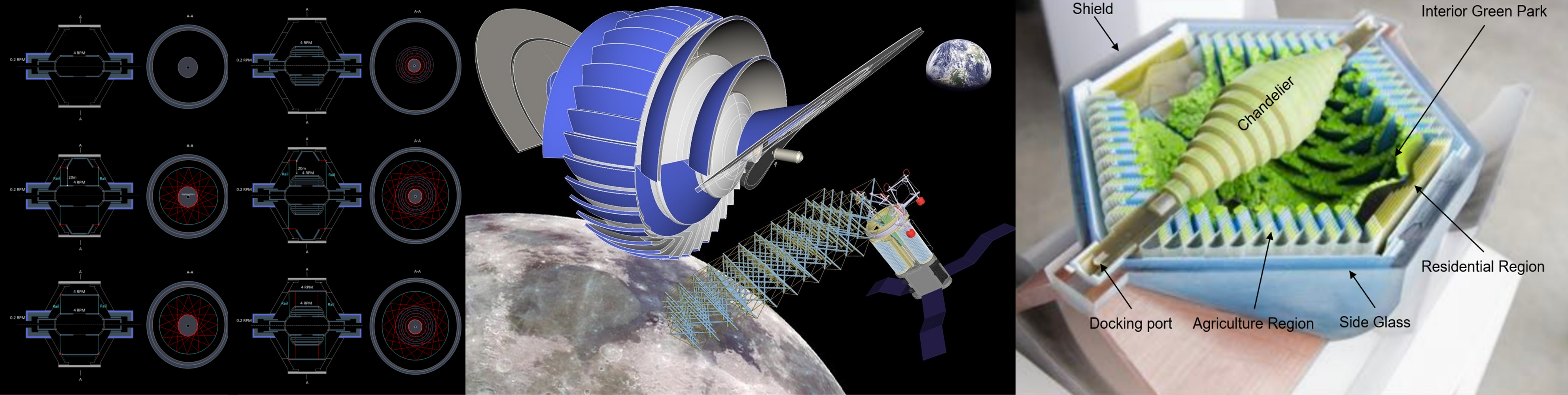
Growable Space Habitat with 1G Artificial Gravity in Deep Space
(Muhao Chen, Raman Goyal, Yuling Shen, Manoranjan Majji, Robert E. Skelton, Joel Sercel, Jane Shevtsov, and Anthony Longman)
Automated Drilling Rig
(Mohamed S Khaled, Muhao Chen, Enrique Z Losoya, Arturo Lopez Nava Jr., Alkassoum Toure, Salim Al Kharsa, Tom Nan, Ran Wang, Luis A Rodriguez, Eduardo Gildin, Robert E. Skelton, Sam Noynaert, and George Moridis)
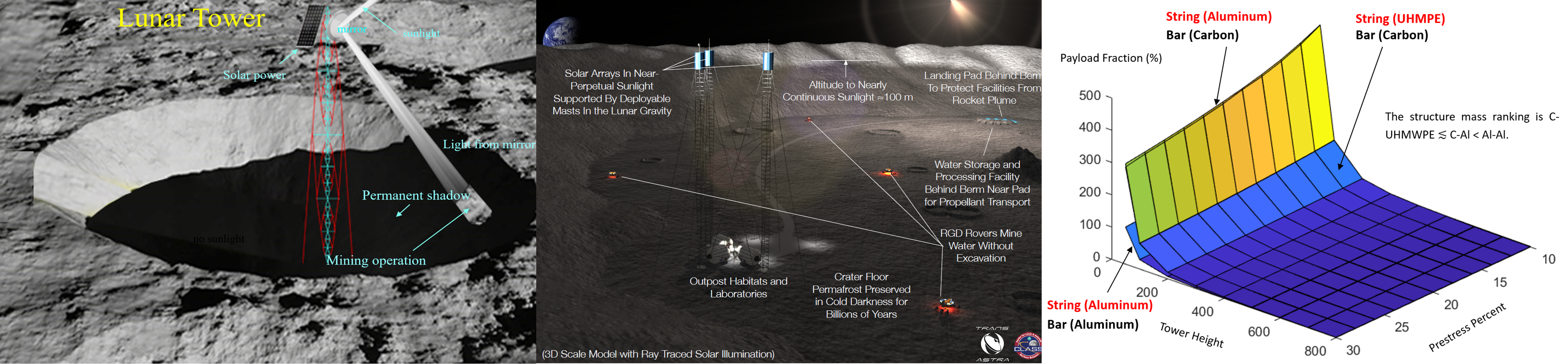
Lunar-Polar Propellant Mining Outpost (LPMO): Affordable Exploration and Industrialization
(Joel Sercel, Craig Peterson, Anthony Longman, Muhao Chen, Manoranjan Majji, and Robert E. Skelton)
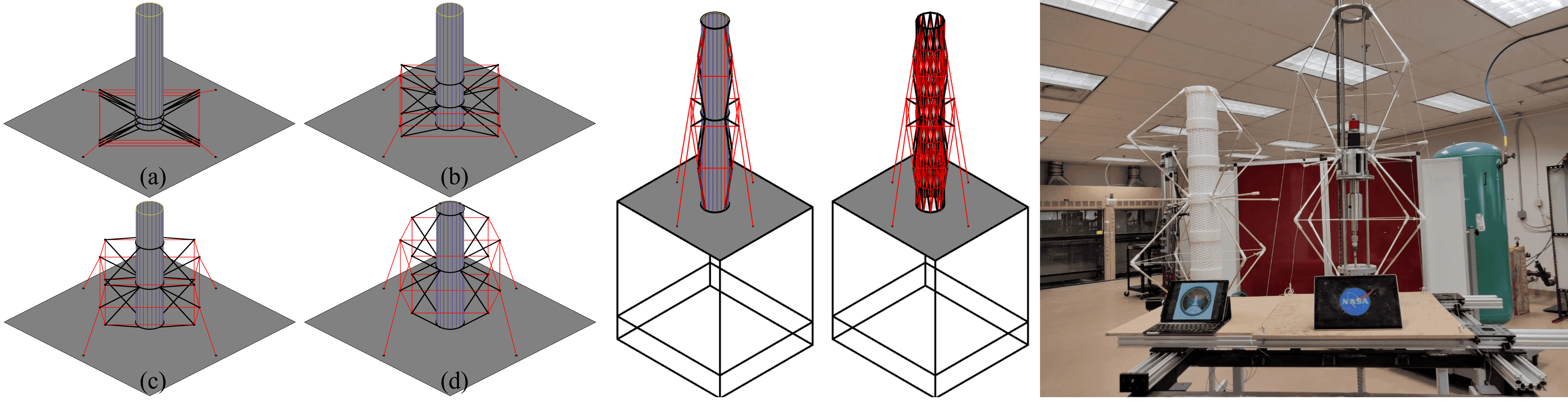
Double-Helix Tensegrity Spherical Planetary Lander
(Muhao Chen and Robert E. Skelton)
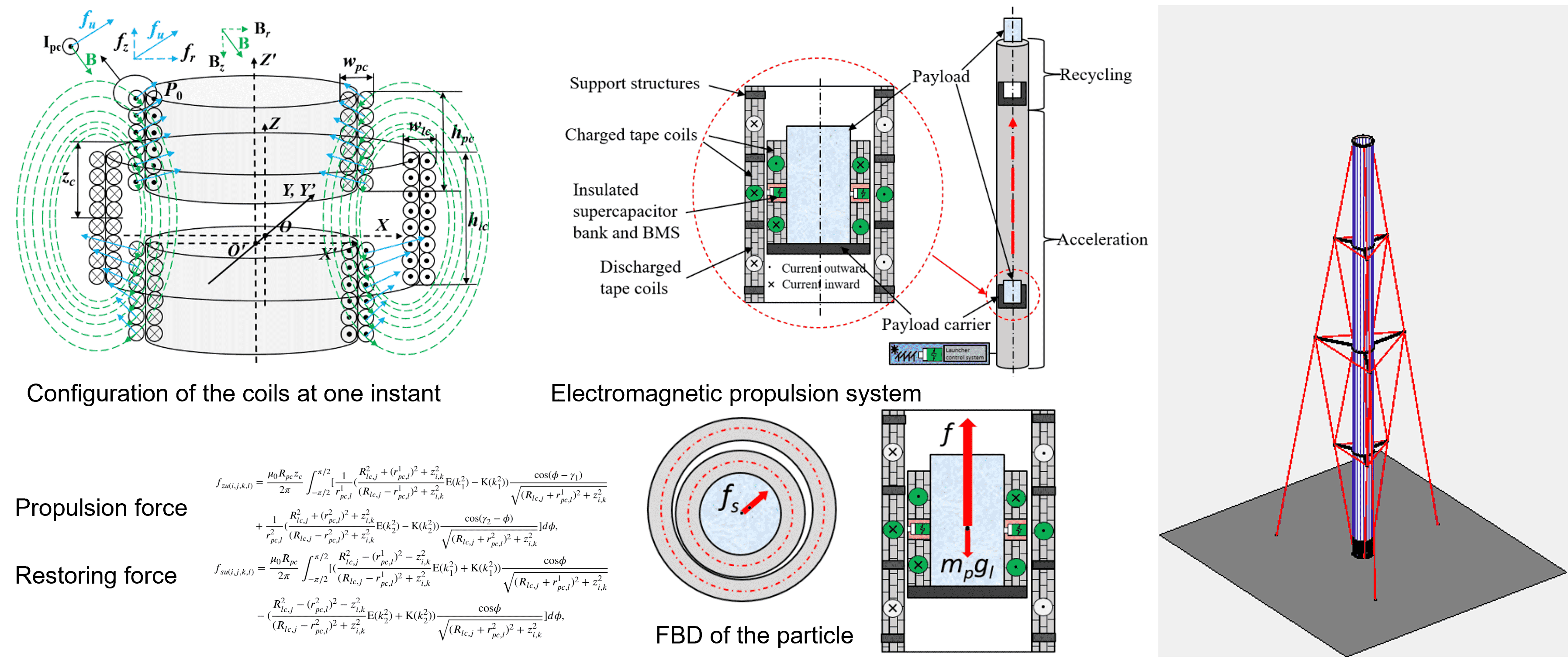
Electromagnetic Lunar Launcher
(Xiaowen Su, Muhao Chen, Manoranjan Majji, and Robert E. Skelton)
Minimal Mass Design for Clustered Tensegrity
(Muhao Chen, Xiaolong Bai, and Robert E. Skelton)
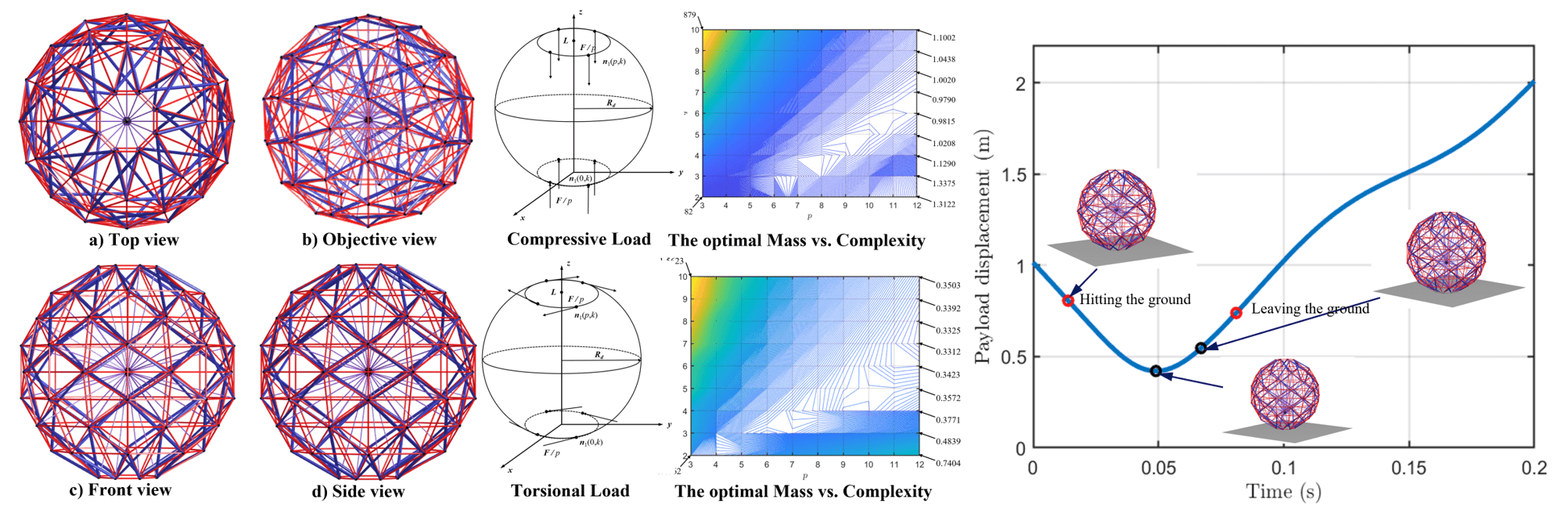
Mass Efficient Double-Helix Tensegrity and Origami
(Muhao Chen, Manoranjan Majji, and Robert E. Skelton)
Statics of Integrated Tensegrity and Origami Systems
(Shuo Ma, Muhao Chen, Hongying Zhang, and Robert E. Skelton)

Clustered Tensegrity Systems Considering Pulley Sizes
(Shuo Ma, Yiqian Chen, Muhao Chen, and Robert E. Skelton)
Deployable Tensegrity Roof with Covers
(Shuo Ma, Muhao Chen, and Robert E. Skelton)
Low-cost, Lightweight, Deployable Shelter subject to Extreme Environments
(Muhao Chen and Robert E. Skelton)
 |  |  |  |  |